Work Experience

Toyota Research Institute
2019-Present
amazon robotics
2018-2019
nuTonomy
2017

Ivani
2016

UT Health Visual Science Lab
2014

Boxer Property
2014-2015

Organizations

Interactive Robotics Laboratory
Olin Robotics Lab

Aquaponics
OWL Extension Project Team

REVO
Olin Electric Vehicles Team
Projects: Senior Year

An Exploration into Recurrent Neural Networks
Independent Research Study
Projects: Junior Year
Project: Gemini
Robotic Systems and Integration

CudAI
Software Systems
Projects: Sophomore Year
Project: Nevo
Computational Mobile Robotics

Neato Driver
Computational Mobile Robotics
Frost
Stark Industries
Projects: Freshman Year

#GetReal
Software Design

Cap'n Chicken
Software Design

2D Image Processor
ISIM

Fly like an Eagle
Design Nature
Hackathon Coding Competitions

PPR
HackHolyoke 2016

SmartLite
Codestellation 2015

GoBikes ONLINE
Hack Holyoke 2015
High School Highlights

2048
High School Finale

MAO - Mu Alpha Theta
Webmaster

NFL Debate
Debater and Coach

International Club
Artistic Director
Toyota Research Institute
Software Engineer
2019-Present

The latest vehicle used for autonomous development at TRI.
Toyota Research Institute, the research arm of Toyota, performs cutting edge research on robotics with the ultimate goal of advancing technology to improve safety, mobility, and human ability. There are several divisions in TRI, such as household robotics, advanced battery design, and autonomous vehicles. The autonomous vehicles division was researching a two-step path to product towards automating vehicles, first with Guardian, a partially intelligent vehicle that can aid the driver in dangerous and inconvenient situations, and then Chauffeur, a fully autonomous vehicle that can completely drive on its own. In August of 2019, I joined Toyota Research Institute as a Software Engineer on their Automated Driving division. Autonomous vehicles was exactly what I wanted to get into after college, and with TRI I had the opportunity to do exactly that, so I was very excited. I started Day 1 with 110%, ready to learn a ton about robotics in industry and also contribute a ton to the success of TRI's Guardian vision.
About three months after starting, I was well past onboarding and deep into working on tasks and projects. A major complaint I kept hearing from my teammates was how long and tedious it was to iterate on technology development. Procuring data logs took an incredibly long time to download from the cloud, gathering a dataset was even harder and longer, and testing features was practically limited due to the data storage system's lack of capabilities and flexibility. There didn't seem any movements or efforts to make things better, so I decided to make one. Starting from gathering user stories to defining my own requirements to designing and implementing a system to user testing and iteration to finally deployment, near the end of 2019, I went above and beyond to create FAST, a brand new system built from scratch that automated and substantially sped up TRI's data storage system. FAST revolutionized data storage at TRI, reducing download times from hours to seconds, provided automated dataset curation capabilities with the click of a button, and made testing significantly easier, opening the floor for new testing systems to be developed. Feedback was overwhelmingly positive, and a month later I worked with others to fully integrate FAST into the TRI organization workflow. FAST became the atomic unit of data at TRI, and still is to this day. Even after FAST's hype plateaued and it settled into the normal everyday flow of everyone's work, later systems and newer architectures continued to make use of its flexibility and build off of it to create new testing components, new machine learning pipelines, etc. And it's worth noting that my manager did not assign this to me as a task. There was no top-down effort or anyone telling me that I need to do this work. FAST happened because I saw a problem that I had an opportunity to solve, and I intrinsically wanted to fix it and make things better.
At around the same time, I had pushed a number of changes and new code into the organization's code base. At some point I started really wondering whether I was impacting the stack's computational performance, whether it was getting too slow. I asked around about timing and budgets for the planning and control stack, and was surprised to hear that while there was some word-of-mouth understanding and communication of how long our stack took to run or how long our stack was supposed to run, there was no agreed upon timing contract. So I talked with my team and created an initiative to concretely agree on a timing contract between all major teams in the driving division. I led the effort and engaged heavily in inter-team communication, organizing meetings to discuss budgets, and co-creating a website that processed the latest timing numbers and made computation performance easily accessible. Ultimately, near the end of Q1 2020, we were able to establish an organization-wide timing budget, we had deployed a website to help track the timing budget, and most importantly, we had helped push the conversation of timing and performance into the spotlight. Through my work, the organization actually realized that its major components in the stack were going over allowed timing budgets unnoticed. Teams started paying more attention to performance, and across the board the stack was able to start driving its timing performance down significantly to acceptable budget standards. Today, the numbers in the contract have changed slightly, but the budget is still very relevant and teams still use it conceptually to discuss performance and keep an eye on the stack's computation limits.
By this point I think I had proven myself to the company to be a valuable teammate, as my manager soon came over and handed me a very broad and high level project whose mandate was to create a new self-contained component to localize surrounding agents to lanes on the road. There was some functionality that existed already, but it was primitive and not modular enough for longer term usage. Thus the goal was to create a new and improved system that could stand the test of time. I worked with teammates and led the project to design a new lane association system. The outputs of this system would be critical to the prediction team's stack, as it would basically decide how the stack would handle incoming obstacle inputs. It was a great responsibility, and I took it on in stride. After about 3 months near mid-year 2020, we had deployed a robust model-based system that could consistently deliver accurate associations for any obstacle in the road. The prediction stack was working much smoother, and with more consistency given the new inputs from the lane association system. In addition, the system was built flexible and modular enough such that once others saw it working in deployment, they also wanted to use it and augment its capabilities. Today, the lane association system is now more of a spatial inference system, as it serves multiple use cases and contains a multitude of related functionalities beyond just lane association. Several outputs are used by other teams in addition to even different components within just the prediction stack. This was the first major project I took from conception to implementation to deployment that had direct impact on the stack itself, and along with my work on machine learning projects explained below, my performance on leading these projects and getting stuff done was strong enough to receive a promotion within 2 years of starting at TRI.
After deploying the lane association system, I was given another high level project to add a new feature to the prediction stack, which was enabling cross yielding prediction support. The mandate was to give the prediction stack the capability to predict which vehicle was going to go first at a crossing interaction, e.g. unprotected left turn scenarios. I led this project, and once again started with defining user stories, creating scenarios, and defining requirements for the MVP. I then worked with some teammates to design a model-based system to predict crossing interactions. I implemented the design and tested it using datasets curated from FAST. Near the end of Q3 2020, I deployed a crossing yielding system MVP that can handle crossing interactions between two vehicles. My system was the first in the stack to attempt to conquer the crossing interaction scenario, and the work I put into the system paved the way for the eventual handling of crossing interactions by the entire stack such that the subject vehicle could actually behave and move appropriately in reaction to what it thinks other vehicles are planning to do at the crossing interaction.
At around the same time as working on the crossing yielding project, I was also personally very interested in machine learning, and I noticed some other machine learning projects happening within the team. I reached out and asked them what they were working on and if there was anything I could work on to help and get involved. I was able to get on a project involving a deployed machine learning model in the prediction stack. A teammate wanted me to help expand a RNN model's operation domain as well as improve its accuracy. The model name's is the Corridor Intent model, and it basically predicted what lane a vehicle was going to drive in over the next few seconds. The problem was that it was limited in the scope of vehicles it can work on, and it performed poorly for certain edge case scenarios. Intrinsically motivated to dive in, throughout the second half of 2020, I put in a lot of time to experiment with the model and dive into the data or change aspects of the model to see what happens or watch how the model reacts to different scenarios. I then upgraded the dataset used to train the model as well as performed exhaustive evaluation to deploy an upgraded model that would work in more scenarios beyond the original to the same bar of quality. In addition, a separate effort that I worked on also for Corridor Intent was to explore adding in new features to improve the accuracy of the RNN model in specific pain point use cases, primarily cut-ins on the subject vehicle's lane. I performed novel research to experiment and understand the effect of different features on the model. I also experimented with some different techniques to change data representation which might make it easier for the model to learn from. I then made an empirical argument for what I thought would work the best, convinced my teammates that this was the best way to go, and then implemented and deployed another upgraded version of the model that could handle cut-ins more accurately and in a faster horizon. Evaluation systems for the prediction stacks were telling me that the work I had done for the Corridor Intent system improved its accuracy overall by about 19%. I learned a lot about data and learned modeling techniques and how they're used in deployment and industry. My work on the Corridor Intent model also helped drive down critical bugs and meet OKRs for the driving division as a whole.
Having worked on some machine learning projects at this point, I felt strongly that we needed to dive deeper into learned models in the prediction stack. Talking with other teammates and putting together a comprehensive strategic document for why we should move more into machine learning, I convinced and helped my manager come up with a concrete plan to work on long term machine learning projects. Specifically, we devised an initiative to develop a machine learning pipeline for the prediction team. I wanted to design a long term machine learning workflow that could be robust and flexible for a multitude of learned models and use cases, such that we could identify and deploy multiple models using this single pipeline. The grand vision we came up with was that we could eventually turn the entire prediction stack into a purely data-driven stack, and all of the models that made it up were supported by a single, powerful, adaptable pipeline called PLOP, which did everything from data curation to dataset generation to model training to deployment to evaluation and back to getting more data and trying training again, an endless iterative cycle. It was a huge project and there were numerous pieces, but to speak at a high level, I was in charge of the data curation and model training components of the pipeline. It was a grand embarking that we took from conception to design to implementation over the course of 6+ months. By early 2021, we had completed the data pipeline and were training our first learned model use case, learned pedestrian prediction to predict where pedestrians would walk around in general. Near the end of Q1 2021, we had deployed an MVP of the first use case of PLOP to predict pedestrians. The deployed model showed promise and was on a strong trajectory to become the main predictor for pedestrians in the stack. My work on data curation and model training actually scaled to hit the maximum limit of the organization's cloud team's infrastructure, so ultimately we had to scale back our scope. But to date this was definitely the peak of my performance and of the team's performance, where we learned the most and contributed to something that had the most impact for the company. Although at the end we hit the limit of our company's resources at the moment, I think we still set up a robust, long term pipeline that can be used by future learned models for machine learning development, generalized enough even to be used by other teams in planning and controls. We did great work that set up the proper fundamentals for future development, and I personally learned the most so far at TRI working on this project.
Now presently starting from Q2 2021, I am moving more into a Guardian-specific project. I was given full ownership of the Ego Intent project, a cutting-edge intiative whose mandate is to predict what the subject vehicle's driver is intending to do up to 3-5 seconds in the future. The project has huge potential for TRI and TMC, the parent company to TRI (Toyota Motor Corporation). If deployed into commercialization, there is direct path to integration with existing Advanced Driver Assistance Systems within Toyota vehicles as a standalone system that could substantially improve upon current L2-3 autonomous systems in current Toyota vehicles driven by private owners. In addition, the Ego Intent system would serve as the critical input into the Guardian System to provide comprehensive understanding for driver feedback into the system, acting as the closed loop mechanism for the Guardian stack. I had a very small team to spearhead development on this project, and even then I progressed quickly. I personally self-designed the entire system from start to finish in less than 3 months, with some feedback from teammates for sanity check and outside input through design documents and organizing meetings. As of October 2021, I have a full final design for an MVP of the Ego Intent component architecture and implementation details, and am getting ready to dive into building it out for the initial pipe flush. The Ego Intent project is taking a learned approach to solve the problem, and so there was opportunity to borrow aspects of PLOP, the pipeline I helped make previously, specifically the data curation and deployment components. However, the Ego Intent system is fundamentally different from other prediction work I've done because it focuses on the subject driver instead of surrounding obstacle drivers, thus I created a full design by myself for the rest of the machine learning pipeline, including dataset generation, data validation and loading, model training, and the model itself, which was a new RNN model. Not only did I own the project, but I also took on leadership responsibilities to manage the project, coordinating and collaborating with the other teams in the Guardian effort, and delegating tasks to teammates working on the project with me. I am taking on greater and greater roles here at TRI, leaning more into leadership both team-wise and technical-wise. I hope to move further into this direction, as I think that I have an intrinsic knack and personal passion for it. Moving forward, I hope to implement the first version of Ego Intent for deployment by the end of Q1 2022. I also hope to take on more and more responsibilities and own more and do more for the team, both from a people perspective but also a technical expertise perspective.
And that's it for now! I'm still working at TRI to this day, and this page was updated as of October 31, 2021. I hope to update this page in the future with even more endeavors and cool accomplishments. One thing I want to mention here is beyond all the projects and work that I'm loving doing here, I'm also very grateful for my team and the people and culture that I get to work with. I truly believe after working at TRI that it's the people that make or break a project or a company, and so I'm very happy to be working with some incredibly smart and incredibly kind coworkers and friends. They've taught me a lot and heavily trusted me to deliver. I've made some great friends here who I will definitely continue to stay friends with even after I leave TRI someday, and I really appreciate everything they've given me over these past few years.
amazon robotics
Software Development Co-op Collaboration
2018-2019
Amazon Robotics, a wholly owned subsidiary of Amazon.com, empowers a smarter, faster, more consistent customer experience through automation. Amazon Robotics automates fulfillment center operations using various methods of robotic technology including autonomous mobile robots, computer vision, depth sensing, and machine learning. For my final internship in undergraduate, I embarked on a 1+ year long co-op collaboration with Amazon and Olin that would solidify and conclude my project-based learning experience. I interned at Amazon Robotics with a team of 4 others, and we were tasked to help research and develop a robotics system that would enable the company to completely automate their warehouses, from when items come in to when packages are sent out for shipping. Our project was to come up with new, innovate solutions to approaching automation and e-commerce, and to show the feasibility our ideas with a fully-built prototype to be demonstrated to Amazon executives. After about 10 months into the project, we had accomplished just that.
Our project was highly open-ended, as the main criteria was simply to help Amazon come up with a system that could help them achieve their goal of end-to-end automation in a warehouse. I was the only software engineer on a team of mainly mechanical engineers, so it was my job to cover everything that wasn’t hardware-oriented. We engaged in various forms of brainstorming and research at first, and we came up with the general idea that there will be some sort of storage system involved, and individual mobile robots will move between these storage units to handle and process item orders. The question was then which approach to the storage system and the robot would lead to the most optimal increase in productivity and scalability for Amazon. We began narrowing down to a few ideas and modeling them in real life using cardboard and wood. I ,being in charge of the entire software system, also began building out a preliminary architecture that would enable autonomy within the overall system. Through iteration and team discussions we made a plan to fully build out one of our ideas to showcase to Amazon at the project’s Midpoint Presentation. I not only finished building the software stack for the mobile robots and the storage system, but I also moved down to firmware and helped get a lot of the low-level sensor reading and processing working too. I also helped integrate with the mechanical system with teammate Cedric Kim, which was a huge effort due to a team miscommunication prior to integration. By the Midpoint Presentation, we were able to successfully demonstrate a working prototype of the idea we found most promising. It wasn’t perfect, but it was a start in the right direction.
Moving into the second half of the project’s timeline, we realized that our original promising idea was flawed in various ways, so we moved to further crystallize and concretely define exactly what the best system would look like. At this point, team communication was showing signs of stress and wear, and team members were having difficulty fully narrowing down the optimal design within our parameter space. I began also taking on a project manager’s role to help facilitate healthier and more productive team meetings so that we could quickly pin down the best design and scope out how we would go about building a prototype for it. As a result of my efforts, other team members’ engagement were reignited, and we swiftly made progress towards the optimal system. The new system required a significant redesign from our previous model, as it was a heavily improved version of the first. The mechanical team got to work, and through the length of the second half, I redesigned the entire software architecture twice until we managed to iterate to a promising implementation of our system design. I also helped redesign the firmware for the robot as well, and once again co-lead integration with my teammate Cedric. I continued to take on a leadership role in managing the project to ensure that all components of the system were finished on time and adequately synchronized in their dependencies. I also ensured team health was doing well, and assisted team members with problem solving and bandwidth distribution. Towards the end of the project, we had a much smoother integration and testing phase between components compared to the first half, and we once again had a successful demonstration of our final system design to Amazon.
Amazon was extremely pleased and intrigued by our work. We were able showcase a fully autonomous robot capable of interacting with a novel storage system design to fetch and stow items on demand. They plan on patenting our final system design, and we received very positive reactions from Amazon executives all the way up to the COO of Amazon Robotics. Personally, I have learned a great deal of how projects might work in the real world, and I also have gained more experience in working with sometimes difficult teaming situations, as well as project leadership and navigating through those rough times. I consider this my greatest and final learning experience as a college student, and I thank Amazon and my team for everything they have taught me. I will continue to dive deep into the world of mobile robotics, adaptive learning models, and artificial intelligence (perhaps even in the cloud!), and am planning on searching for a full time position in a computational robotics role.
nuTonomy
Autonomous Vehicle Intern
Summer 2017


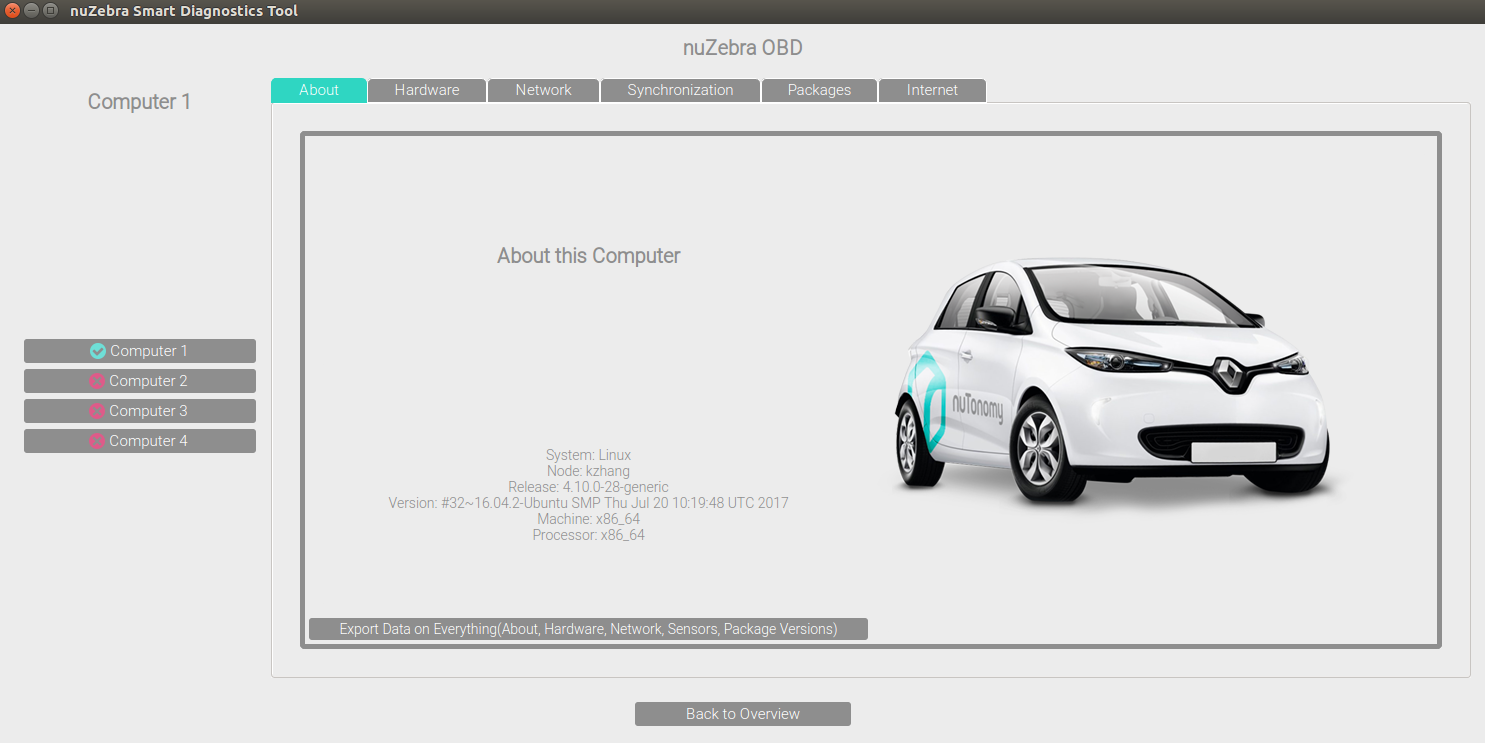
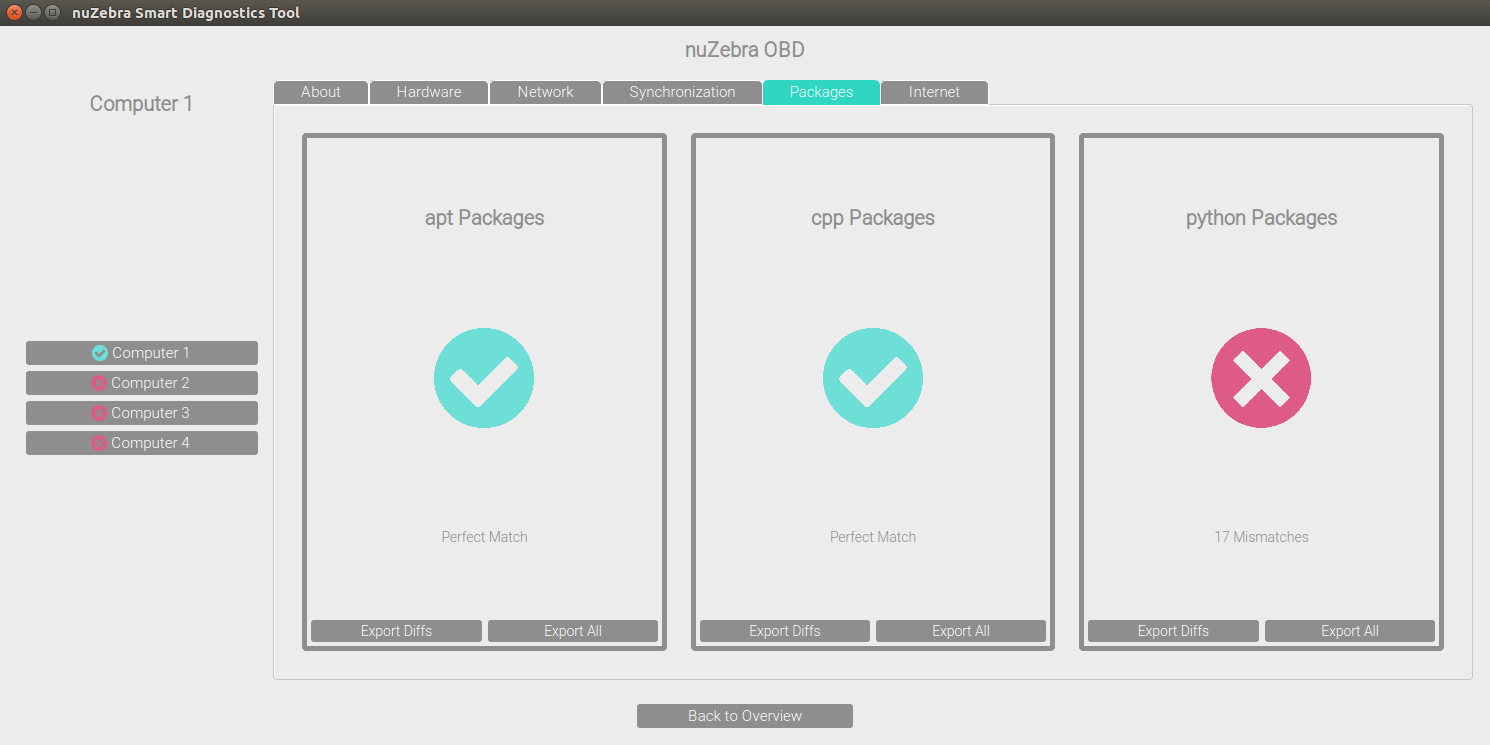
(Above) A team picture of the crew. (Bottom three) snapshots of an MVP of nuZebra.
nuTonomy is a fast-paced startup with a bold mission of completely changing the urban transportation scene. They aim to create their own fully functioning system that enables perception, localization, mapping, planning, controls, and safety for an autonomous vehicle. And their software, nuCore, is on track to make it a reality. As one of the only two undergraduate interns given the opportunity to work with nuTonomy over the summer, I dived right into the fray to not only learn more about the world of driverless cars but also contribute to the company and help them reach their goal.
At the start of the internship, I was tasked with the formal project of creating a smart diagnostics tool for Team Car, the group that interfaced most closely with the autonomous cars themselves. I was to work alone on the project, and the only major requirements were that it could scan as many aspects of the car as possible and provide immediate feedback as to the car's condition, and that it remain easily usable, maintainable, and modifiable, as future users might find a new problem that they would want added. Doing my own research, I realized that Team Car was largely responsible for software road release testing, car maintenance and conversions, as well as code debugging and software release management. Whenever a problem was discovered, such as a car breaking down or the code not working, Team Car would have to go down a large list of possible problems and manually check them one by one. Observing them one time attempting to figure out why a car wouldn't start, I found that it could take them up to a week just to resolve an issue before even starting with testing or more productive items, and often times the same type problem would occur, making it seem like the team was running in circles. The goal for my tool was to automate this process, and prevent unnecessary manual labor from hindering progress on the software new releases. Thus I began to work on the tool, later naming it nuZebra (zebra is slang for "exotic diagnosis" in medical circles).
To begin, the tool needed to be scalable, yet fast and accurate. Since a number of people in the company weren't software majors, the tool also needed to be easily usable by a lay man. I used Python and PyQt as my main interfaces because the company was most familiar with these libraries across the various teams. I decided to build the tool from the ground up and use an iterative process to prototype increasingly complex interfaces and frameworks, taking into account feedback from others. I spent most of my first six weeks creating the backend framework, making sure to establish a modular, multi-layered code architecture, such that later code modifications were easy and did not disrupt the core of the software. After finishing the backend mechanism and ensuring proper functionality of the tool, I turned to content creation and front end design. Since the software I was creating was meant to be an internal tool used by the company itself, I decided to hold weekly meetings with company members to get their input on how the tool looked and felt. Near the end of the summer I also held a Team Car-wide meeting to get their feedback on the UI, since they were most likely to be the main users. I ended up designing a highly minimalistic interface with nuTonomy's color scheme and simplistic buttons as the main interactive mechanism. All data and information was split into high level and lower level types, with high level immediately displayed and lower level accessible with the push of a button. The tool covered software statuses and release versions, sensor statuses and incoming data, as well as system information and hardware data. There was also room for car CAN bus data as well as mechanical outputs, but due to time constraints I could only create the framework for those. After many iterations and much polishing, I was able to deliver a fully functional, well designed nuZebra to Team Car.
In addition to its completion, I was also able to deploy my tool onto the cars. We tested nuZebra on the autonomous cars to great success, and even went out on a software road release after using it to efficiently ascertain the status of the car. The team was glad that they could now spend less nights working at the company, and my manager was even surprised by the ease of use and amount of data I was able to incorporate into nuZebra. They plan to use it for future testing and incorporate it into their formal car startup and road release sequences.
(Left to Right) Visualizations showing the proof of concept of the Reinforcement Learning environment being implemented on a parked car avoidance scenario, first starting out, then training 1500 trials, and then converged behavior after 1500 trials.
My main project was going so well, that at some point I realized I was almost a month ahead of schedule. With my manager's approval, I decided to seek out new side projects where I could help other teams on as well, since I had the extra time and desire to learn about what other teams were doing.
I found a side project with the perception team, who was looking for a way to automate config/param loading and execution. At the time, for every different scenario or car, the team had to write up a brand new config file, manually download the data logs and then hardcode numerous environment artifacts so that they could load it into the system upon runtime. This resulted not only in slow testing iteration, but also created a troublesome 100GB+ structure in the codebase due to massive numbers of config files that had to be saved and data logs being held on disk, most of them being identical save a few differences for different maps or scenarios. I then helped the perception team design a generator that could automatically create config files in real time and handle data from the cloud. It utilized a pool of possible config templates, and then with a few parameters could build a new config file for that specific run of the system. Using the information from the auto-generated config, it could download the appropriate data logs and environment artifacts on demand instead of holding them all on disk. The generator was also wrapped up as a nice executable module, so all one had to do was call it and it would run with the given parameters. The generator was also built to be highly modular, so the parameter/config file could be customized as much or as little as one wanted. The generator ended up cleaning up a huge section of the codebase, and since it could be called at runtime, streamlined execution of the nuCore system.
Due to the first one going so smoothly, I also found a second side project to work on. The planning team head was curious about potentially incorporating new models into the planner that determined how the autonomous car moves, and he wanted someone to spend time exploring different types of planning models. The planning team head noted he believed that there is a fair chance the optimal planner would require both deterministic and nondeterministic models to fully account for all possibilities. Since the current model is mostly deterministic and operates on a priority-rule based system, he wanted me to research nondeterministic models and their feasibility in solving complex problems. After much digging, I learned about multiple different options, such as Sequential Game Theory, Value Iteration, and Learned based models. I became very interested in Reinforcement Learning as a potential candidate. Since it was the backbone of AI achievements such as conquering Go, Chess, and most recently a multiplayer online video game known as Dota 2, I thought it might work as a suitable model. I did a lot of offline self-learning and research in an effort to fully understand Reinforcement Learning and how it might work in mobile robotics planning. Towards the end of my internship, I was able to construct a Reinforcement Learning environment that solved mobile robotics problems. I then applied it to a parked car scenario and created an MVP, which I presented to the planning team lead. Due to time constraints, I used a fairly simplistic Reinforcement Learning implementation, where I built a Q-Learning machine learning algorithm. The position of the vehicle was considered the state space, and the actions in this instance were discretized to be turn left, turn right, go straight, or stop. I then used an advanced form of the Bellman equation with a simulator that I built to simulate a converged behavior of the autonomous vehicle successfully navigating its way through the scenario. The MVP showed that RL-based models could be feasible for autonomous car planning, albeit some caveats and further research needed to more concretely ascertain its exact usefulness. The planning team was grateful for my efforts in exploring an unknown territory for them, and said they plan on looking into it with more scrutiny in the future.
My experience with nuTonomy was an amazing and symbiotic one. An autonomous vehicle company like nuTonomy was my dream company for this summer, and I got my wish granted. I worked harder than I ever had before for a company, and helped them optimize their codebase, improve their testing and car system, as well as introduce new potential models to the planning team. In turn, they gave me so much advice and taught me many things about mobile robotics, planning, and AI systems. Most importantly, they helped me finalize my decision to pursue mobile robotics as my career path. Moving forward, I hope to immerse myself further into the world of robotics and intern at a larger robotics company to gain even more experience. I look forward to the day I can see a nuTonomy taxi on the roads in Boston.
Ivani
Software Engineering Intern
Summer 2016
Note: I am currently under a special IP contract, but I'll do my best to convey my work.
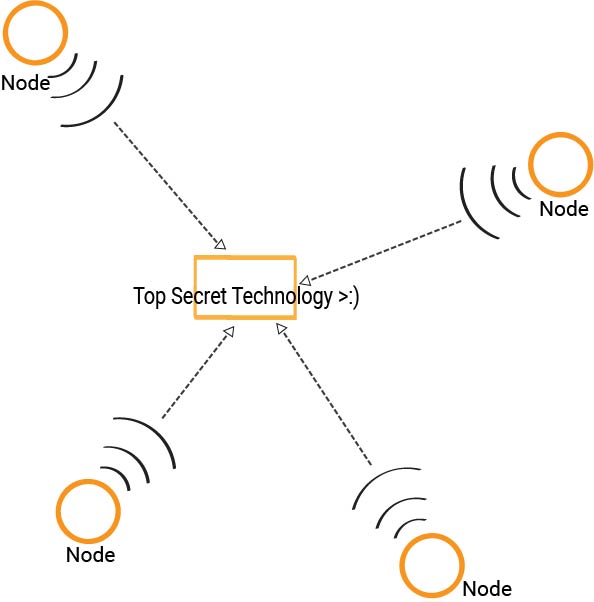
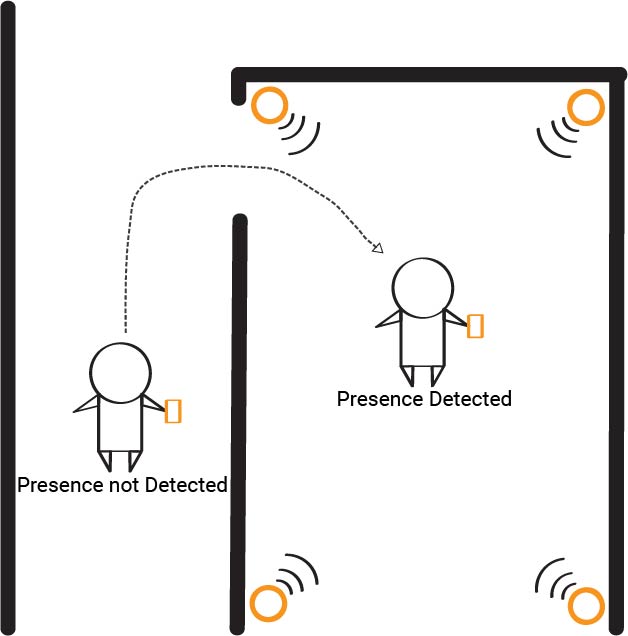
A basic visual of the technology my team created
Ivani is a start up working on revolutionary network presence sensing technology that allows wireless communication systems to observe RF disturbances without the addition of new hardware. It then analyzes these disturbances to determine the physical occupancy of a person inside a room. As a college freshman, Ivani took a chance on me as a student with comparatively less experience but equipped with a wide array of skills and a bright motivation to learn and make an impact, and I seized the opportunity to deliver.
Teamed up with fellow Oliner Liani Lye, I was assigned the task of creating a testing module for the company's original presence sensing system, with the idea being to train the original. We exceeded the project goals and ended up developing a brand new patent-pending presence sensing technology that not only trained the original system but could also act as a stand alone presence detection system. The technology we created both detects a person's physical presence, and also determines where the person is in reference to the detection field, such as how far away they are, whether they are approaching the room or moving away, etc. What's special about the technology is that it doesn't require any new hardware; all nodes of the system can come from off-the-shelf hardware that most households already possess. This makes our technology both extremely modular and easily integrated into existing systems. Our team was well organized with weekly sprints and check-ins with each other and our supervisor, constant communication and pair programming, as well as occasional personal conversation to ensure best performance from the team. Because we were trying to create something that had never been done before, we used a very systematic approach, first performing many tests and experiments to understand more about the system, then breaking down the problem into smaller portions that we would individually tackle, and then eventually re-combining the pieces using an iterative process. My role on the team for this project mainly involved designing the software algorithms and optimizing them, as well as writing firmware for sensor hardware. I was also involved in sensor fusion and decision making, trying to understand the data we were seeing as well as mapping out where the user is in context to the detection system. We ended with an MVP that interfaced with a Raspberry Pi and created a network of sensors on the user, in rooms, and in the hallways. It determined presence, relative location of the user to a room, and real time movements of the user. Our creation will streamline further development of the full-timers' main presence sensing technology and expand the company's repertoire of presence sensing capabilities. Our work paved the way for Ivani's next projects in the pipeline, People Counting and People Locating.
In addition to the main project, Liani and I also thought up a secondary project that we believed could augment the main project we were working on. I personally spearheaded this exploratory venture, and I ended up creating a sensor construct that integrated additional data streams to improve the output of the main project. The process for this project mirrored that of the main. The augmentation I created stabilized the main algorithm and provided more consistent and accurate outputs. Because of the additional sensors I integrated into the system, we also created the framework for the ability of the technology to learn trends and statistics, thus being able to predict the pathway that a user will most likely take in a home and optimize lighting or other appliances. The construct I added to the original project ended up increasing accuracy of outputs and predictions by about 40%, thus significantly boosting the system's performance.
The technology we were creating was so new that we eventually realized that it could be patented. We contributed to a patent application on this new technology, effectively bolstering company assets. The patent, Reverse-Beacon Indoor Positioning System Using Existing Detection Fields, is currently submitted and is in progress for filing. The company estimates that the patent will be worth at least $300,000 once it's completely filed and being utilized.
Besides the main projects I worked on, I also took initiative to take on several smaller quality of life projects not just for my team but also for the company as a whole. I flushed out a modular code architecture for future software development that increased code readability and organization and also provided easier development of new codebases. The framework compartmentalized the presence sensing process into three main parts, and outlined general methods that all processes should use. The architecture was actually implemented in our team codebase and made both communication and debugging much more efficient. I also laid the foundations for test-driven development by conceptualizing a unit testing system that allowed for more optimized development. I not only designed a robust unit testing process but also wrote a comprehensive guide to allow the full timers to learn about the system on their own time. While the system isn't currently being used because the company is still small enough such that direct communication is faster, the company definitely believes that it will come into use once the company grows further and a more organized system will be needed. Finally, I helped characterize test inputs for system development, running various experiments to help the company better understand the data they were reading. I actually came to several conclusions that gave the full-timers many new things to consider moving forward, such as trends in the data and previously unknown traits that occasionally will be exhibited under certain conditions. Using data analytics, I ended up finding a flaw in the current microcontroller the company was using and confirmed the need to switch to a new microcontroller, which was two times faster and much more consistent.
Overall, the Summer of 2016 has been the most fun, most educational, and most accomplished summer I've ever had. I believe that both Ivani and I have benefitted greatly from this experience, and I can't wait to see what's next, for me and Ivani.
Opthamology - Connexin Research
Research Study
Summer 2014 - Spring 2015


During 2014-2015, my entire senior year at William P. Clements High School, I worked as a research intern at UT Health at the Medical Center in Houston. I was looking into the visual sciences, specifically examining proteins within the eye and how they all connected together to form the massive network that allows humans to see. Under the direction of Dr. O'Brien, I experimenting on zebrafish eyes to determine co-localization and possible coupling mechanisms involved in the proteins in their eyes. I gained many useful skills for the lab, including cryosectioning, immunostaining, and high-end microscopy. I also learned more about opthamology and about scientific research in a profressional laboratory. The internship concluded with a presentation of my work to lab associates and officials. Ultimately, my results help the department secure a grant for further research.
Boxer Property Management Corporation
Accounting/Treasury Internship
Summer 2014 and Summer 2015
Boxer Property specializes in property management. They use a variety of services to help new and old tenants work on their office space to make them more efficient and productive.
During the summer of 2014, I worked as a Treasury Intern at Boxer Property. I mainly worked on the annual Closing and Property Analysis. I created Electricity, Tax, and Escalation Reconciliations for over 40 properties, collaborated with coworkers on Balance Sheet Reports and Acquisitions Reports, and even worked directly under the CEO. I was offered a second internship at the company the summer of 2015. This time I was given a larger role in the company, expanding from the Treasury department to the Financial and AR departments. I created reconciliations for all owned properties, worked with others on Boxer F2 Appraisal Reports, and also compiled Due Diligence Reports directly for the CFO. I learned a lot about the field of finance, and Boxer has also given me the opportunity to return for future internships, proving my value to the company.
An Exploration into GRU Neural Networks
Independent Research Study
Spring 2019

The Loss Graph of my final GRU neural network, when it became capable of writing its own sentences after reading all the books written by Scott F. Fitzgerald. The curves of the training and validation sets indicate a solid convergence and a high degree of learned proficiency, which after only 3 months of largely self-learned skills in GRUs is quite a feat.
For my final semester of undergraduate, Spring of 2019, I decided to undertake a personal independent research study into machine learning, particularly recurrent neural networks. Since this was my last chance to work with one of my favorite professors, Paul Ruvolo, on machine learning, I decided to craft my own curriculum and created a comprehensive recurrent neural network learning plan to maximize my time with him and learn as much as I could about LSTMs, GRUs, backpropagation through time, and everything else. This was my first major endeavor into recurrent neural networks with a mentor, so it was largely meant as a learning experience. I wanted to get as much out of college as I could before I headed for the real world, and having some more experience in machine learning under my belt was something I really wanted.
For the first segment of the project, I mainly engaged in research and reading papers and blogs by prominent machine learning experts. I did a lot of self-learning, figuring out on my own how backpropagation through time worked, how a basic recurrent cell functioned, how it compared to vanilla machine learning models. After I figured I had the basic idea in my head, I tested it out with basic networks I created, such a vanilla RNN that could learn the single word “hello”. It was a very simple model, but it helped validate and solidify the mental model in my head.
For the second segment of the project, I dived deeper into RNNs, now expanding into LSTMs and GRUs and learning more about how the learning occurs within the model and also how different hyperparameters affected the model. There was a lot of tinkering in this segment, as I was fiddling with numbers, datasets, and increasing the complexity of my model to better understand how it was influenced by certain factors, what made it tick, etc. I trained GRU networks from learning just a fixed set of words, all the way to having it read an entire dictionary and then tell me the probability distributions of the next letter given a starting prefix. It was very enlightening to get insight into the inner workings of GRU networks, and I was exposed to a lot of different ways to manipulate and control networks to work the way I want.

10 samples from the final trained GRU neural network. Note that all 10 sentences were only sampled to 100 characters. Upon a quick read, one can easily understand the level of intelligence contained in writing these sentences, albeit one can hardly comprehend what they mean.
For the third and final segment of the project, we decided to continue on our language modeling journey and reach the goal of being capable of generating our own text after reading known literature. Here was the culmination of our work, going from simple, basic understanding to more complex exposure and insight to finally applying all of this elevated knowledge towards something tangible and significant. We trained a GRU 3-layer, 512 hidden size network on one of Scott F. Fitzgerald’s most popular books, taken from Project Gutenberg. Our first attempt looked almost too perfect to be true, and that’s because it was, as the network had overfitted onto the book and somehow had memorized every sentence in the entire book. To fix that, we added in all of Fitzgerald’s books, and implemented early stopping, orthogonal weight matrix initialization, and included the Adam optimizer for gradient descent optimization. On our second, improved attempt, we had successfully written new text that was unique and new! As can be seen in the above sample where I generated 10 sentences capped at 100 characters, the sentences are quite grammatically correct and understandable, albeit being not really comprehensible. However, given the loss graph at the top and the learning shown in the 10 samples, I believe there’s more to the network than it’s showing. The next step might be to look into improved sampling methods, such as fluctuating temperature of softmax sampling, so that the network can show more of the intelligence it has derived from reading all of Fitzgerald’s literature. Overall, it was a smashing success and great validation on everything I had been doing and thinking about all this time .
Paul was a huge help the whole way through with debugging assistance and advice from his experience when I got stuck, and he was very pleased with where I made it to by the end of the semester. I honestly couldn’t thank him enough for his help in enabling me to learn more about something I’m passionate about, and I think this was an amazing way to send myself off into the real world. Paul and Olin College have given me an opportunity that I will always remember, and I will be sure to take what I have learned with me past graduation and forever onwards.
Project: Gemini
Robotics Systems & Integration and Interactive Robotics Laboratory joint venture
Spring 2018
In the Spring of 2018, the highest level course in robotics at Olin, Robotic Systems and Integration, decided to shift its focus towards teaching students professional research and learning first hand how research is conducted in the real world. To make it as realistic as possible and bring in as many resources as we could, the Olin Robotics Laboratory and Robotic Systems and Integration teamed up in a joint venture to launch four research thrusts for a semester. I was the leader of one of those thrusts, in which I combined my existing team from the Interactive Robotics Laboratory (a subset of Olin Robotics) with my class team from Robotic Systems and Integration to form a research group. We set out to research if it was possible to create a robot system that was intelligent enough to build a structure together with a human. By the end of January 2018, we had received over $1000 in research grant funding from the college, and Project Gemini was underway.
I was project manager of my research group, composed of 10 students from both the class and IRL. We set up 4 subteams: Perception, Planning, Controls, and Acutation. Each team worked within themselves to research and complete their portion of the project, and I provided guidance and advice to each team individually, later coordinating efforts to integrate the overall product together as well as leading the high level direction of all subteams so that we all ended up on the same page. I was personally in charge of the Planning team, which was my focus for the first half of the semester. Our job was to figure out how, when given a set of building blocks that constitute the structure in question, should we go about putting them together into a set of instructions for our robot system to build. We performed extensive research of automated building and generalized a set of criteria that constructing structures generally follow. We then decided that based on the way the criteria functioned, an adaptive learning model might be a good idea to be able to adequately cover all criteria named and possibly more. More research led us to reinforcement learning as the learning model of choice.
My team then dived deep into reinforcement learning. To scope properly for a semester, we decided to go with Q-Learning, as it was intuitive yet powerful and easy to set up. Our initial testing with our Q-Learning model only yielded roughly 50% accuracy when given a structure comprised of building blocks. We discovered that processing on all components within the structure was too complex and would require more high-end models that would put us out of scope, therefore we simplified the problem in various ways, for example assuming that each "level" of a structure must be built first before higher levels can be built because of gravity. Through more research and testing, we eventually tuned the reward function and parameters to reach convergence as quickly as possible, which occurred at around 4.5 million trials. We were able to successfully plan instructions for a structure by "levels", and then just concatenated the instructions we received sequentially going up those levels, which achieved the goal of build planning. We attempted to take it further and expand the capability of our Q-Learning model, however we quickly realized that taking on more levels or more components would just take too long for convergence, and advancing the model to something like a DQN learning model would be necessary. However again, due to time, we were unable to meet the stretch goal. Our Q-Learning model that solved structures by "levels" could converge within 3 hours, reach 99.5% accuracy, and performed the desired behavior perfectly within the same order of magnitude in terms of speed as a hard-coded solver. While we could've taken the subteam further with more time, we would still call our achievements a great success. The Planning team proved that it was possible to create an intelligence that was capable of learning how to build a structure once shown its components, and we were able to create an MVP that demonstrated its feasibility.
After my team was nearing their end goal, I began turning towards the other teams and integration. I had been constantly helping other teams and providing advice as project leader the entire semester, but now it was time to begin more actionable items and help all teams converge to the same product. I spent many hours talking with individual teams and facilitating inter-team communications, so that inputs matched outputs and interactions made sense when put together. We ended up a smooth connected interaction that started with a human using toy cubes to create a small model structure and showing it to the robot system, then the system perceiving the structure and recognizing all the components needed to build it, then the planner I was in charge of taking all of the components and figuring out the optimized way to build them all together into a solid structure, then the controller deciding how to actually execute the planned instructions in the real world and then working with the mechanical actuators to physically build the structure using life-sized building blocks. All members worked with me to make sure that their pieces were integrated correctly with subteams they interacted with, and it was a major group effort to combine all of our research efforts into a polished product. By May, we had completed Project Gemini, a dual UR5 robot arm system that could build any structure a human showed it, consisting up to 125 components.
We presented for our final research presentation and Olin Exposition. In both occasions, people were amazed by our results, and we even had visitors make never-before-seen structures to present to Gemini, at which the system recognized, planned, and executed construction of the structures like it was business as usual, creating almost 10 perfect life-sized replicas without any mistakes during live demonstrations. We were incredibly happy with our successes this semester, as this was not only an achievement for the research thrust in the class, but also a big milestone for IRL the research organization. Moving forward, we hope to be able to keep researching in this direction and create more intelligent behaviors that build off of our achievements this semester. We also plan on publishing a research paper later on, with the hopes of attending a robotics conference in the future.
CudAI
Machine Learning with CUDA
Spring 2018

In the Spring of 2018, for the final project of Software Systems, I teamed up with Sean Foley and Kaitlyn Keil to explore neural networks and how they interact with the CUDA platform by Nvidia. We were interested in implementing neural networks to accomplish basic tasks but were also curious how parallel computation works with the GPU. We wanted to see if it was possible for us to create a basic neural network and boost its performance using CUDA. We dubbed our exploratory project CudAI.
We began our journey by trying to just implement a basic backpropagation neural network in C++. I had the most experience with machine learning, and therefore I spearheaded this portion of the project. I was able to quickly discover the syntax and write a backprop 3-layer neural net that could accomplish the basic task of solving XOR operations. I also made sure that everyone on the team was caught up and understood how the network functioned, as this would be important later on.
While I was writing the BNN, my teammates were researching Cuda. We converged on the goal of modifying my BNN to adapt to Cuda. Once I was caught up on how Cuda worked and what was needed to convert from a regular BNN to a Cuda-powered one, we set to work. We pair-programmed our way through modifications, and eventually were able to successfully convert and run the original BNN I wrote as a Cuda-parallelized BNN that also solved XOR operations. At this point we had successfully understood and created a neural network that operated on Cuda.
We then decided to jump further and try our network on a different task. Sean and Kaitlyn expanded the network to be able to handle more complicated inputs, and we found a database on housing options. We were able to feed in parameters such as price, number of bathrooms, elevation, etc. and the network was able to differentiate houses from one location and houses in another location. It was at this point that we realized that our Cuda-powered network was actually slower than our regular BNN!
Looking into it further, we performed many benchmarks and also researched many probably causes, and concluded two main issues: The first was just that the tasks we were having our Cuda-powered network solve were simply too easy and small scale, to the point that the overhead required to create these parallel processes and sending data to the GPU was already slower than simply running the network sequentially in its regular form. Secondly, we discovered that in multiple points during the feed-forward and backpropagation processes in our network, we were sending memory to the GPU and then requesting it back into the CPU for a few computations, only to send it back over again. We realized that during the overall process of solving a task using our Cuda-powered network, memory was being constantly swung back and forth between the GPU and the CPU, creating a massive time lag in constantly creating, destroying, and re-creating these datapoints in memory between the two processors. This was creating a massive overhead during the execution of the network and thus lagging the overall speed and computation greatly.
After much debugging and research, we were able to more or less resolve the second issue of paddling between the two processors, and we saw an actual successful run of the Cuda-powered network in reasonable time. However, due to lack of time, we were unable to find a larger scale task that could more accurately show the speed of Cuda, so by the end of the project, our Cuda-powered network was still slower than our regular one due to the first issue. We were still able to understand and create a Cuda-enabled backpropagation neural network that could solve tasks accurately and in reasonable(ish) times, so we had accomplished the goals we had set out for ourselves from the start.
I think it was cool to be able to learn more about neural networks and also their applications in more real-world, large scale endeavors. Gaining exposure and comprehension with Cuda was also a very fun experience, and as a team we learned a lot about memory storage and parallel computation. I'm certain the explorations here will be useful in my career moving forward.
Project: Nevo
Genetic Algorithms Environment
Spring 2017
In the Spring of 2017, for the final project of Computational Robotics, I was tasked with two other Oliners, Shane Kelly and David Zhu, to create something "cool". Given the open-ended project, we wanted to do something learning-based that was outside the "mainstream" bounds of machine learning and neural networks to explore and expand our knowledge. Shane then mentioned that genetic algorithms was a thing, and thus we began Project: Nevo.
Genetic algorithms are as the name suggests, algorithms that take parameters/weights as "genes", and use a process similar to natural selection to evolve the genes to their optimized state. Over many iterations of choosing the "best" genes and mutating them to create potentially even stronger genes, the "most fit" gene can be found, which is then the optimized parameters for a given behavior or objective. We decided to implement a genetic algorithm environment that could teach mobile Neato robots how to perform multi-robot interactions, such as teaching a group of robots to form a line.
David was more into codebase architecture and designing a robust code structure and software flow, so Shane and I were in charge of implementing the core of the genetic algorithm software. David created a base environment that included a modular simulator, and Shane and I worked on the Genetic Algorithm framework. We created a modular system for a generation evolution incubator that could plug and play any "task" given a fitness function and a simulation framework. We then both worked on different tasks, thus completing the environment and creating a polished product. Our approach was to establish a strong core system, and then expand from there with experimentation and iteration. Our core consisted of David's environment wrapped around our evolution system, and we expanded with new tasks while optimizing the existing codebase. Shane and I worked extensively first on making our genetic algorithm work with a simple task, and we performed many tests to find the best parameters for evolution. I then began to work on cooperative tasks, and Shane took on competitive tasks. This involved figuring out how to increase the complexity of the task while ensuring it worked with the evolution system. For cooperative tasks, I had included all Neatos' position and orientations into account and factored them all into the reward functions, with double positives doubling the reward. The simulation framework also had to factor in multiple Neatos, as they had to know each other's positions and orientations. I also took on the task of interfacing between our simulation environment and the real world, using sensor fusion and a mirrored framework to the simulation system to create a new system branch that could easily translate our optimal "genes" to the real world. I used computer vision to map our simulation into a 3D space in the real world, and then replaced simulation portions with apriltag markers and sensors. I also figured out how to apply our software onto multiple robots, thus creating a system of mobile Neatos that could interact with each other. By the end of the semester, we had implemented and optimized Neato systems for Waypoint Navigation, Linear Regression, and Tag.
We presented our work at EXPO, and many were highly impressed with our ability to use a non-mainstream model to exhibit highly organized, intelligent behavior between multiple Neatos. Our professor was especially impressed since we showed him something he had never seen before. This project was a great learning experience and also a chance to better understand robust code structure. I learned a ton about the breadth of learning models out there from Shane, and David taught me that a codebase is never fully optimized, as there are always ways to better streamline software execution or improve code architecture. Moving forward, I want to learn more about the different methods of learning that exist, as well as work with mobile robots even more. There are so many things you can do with Neatos once you bring intelligent behavior onto the table.

Neato Driver
Reinforcement Learning
Spring 2017
In the Spring of 2017, for a computer vision project in Computational Robotics, I was tasked with Oliners Nathaniel Yee and Yuzhong Huang to create a project that utilized computer vision in some manner. We were all very interested in machine learning, thus we decided to take advance of the open-endedness of the project to craft a machine learning project that used computer vision as the input.
None of us understood Reinforcement Learning, so we decided to make Reinforcement Learning the focal point of our project. Since we were more concerned with learning the concepts than making an actual product, we settled on a simple MVP of having a mobile robot Neato learn to drive following a lane. We decided to figure out Q-Learning as the principal learning model of our system, and we wanted to use computer vision as our input. I worked extensively on the computer vision and Reinforcement Learning portions. I first figured out how to compress a camera image into a small filtered 32x32 input vector with Nathaniel, using HSV filtering to look for the color of our lane which was made with tape. After feeding that into a neural network created by the rest of the team, I worked on figuring out how to advance the network's weights using Q-Learning with Yuzhong. I used Bellman's modified equation as the core of the algorithm, and then simplified actions down to three: left, right, or straight. We then held a large number of states based on the camera input, and updated the Q-values of each state. After many tries, we were able to successfully implement a fully functioning Neato Driver. It took in inputs from a camera, converted them with the computer vision module, then fed the input into a neural network, which would update itself based on the Q-Learning algorithm. The output would then be fed into an actuation module, which would move the Neato. We caught its first trials on video, and were very surprised by how quickly it picked up on how to follow the lane. Quite literally, it went from no knowledge of the world at all to figuring out how to follow the red lane in just 5 minutes, less than 5 runs along the track!
Our professor was very surprised by our work, as he never would've thought that it could've finished convergence that fast (he actually predicted it would take over 10000 runs). He was very impressed, as were we. The deliverable was relatively simplistic, but we were able to learn a lot about how Reinforcement Learning works. I was able to go from not even know what Reinforcement Learning was to being able to help my team create an MVP using RL as the backbone of a neural network in under a month. We also were exposed to a lot more learning concepts that we never knew existed just by doing research on RL. I also became extremely interested in the Learning space due to this projec, and I hope next time I'll be able to learn about neural networks and more advanced learning topics.
Frost
Autonomous Snowball Launcher
Stark Industries
Fall 2016
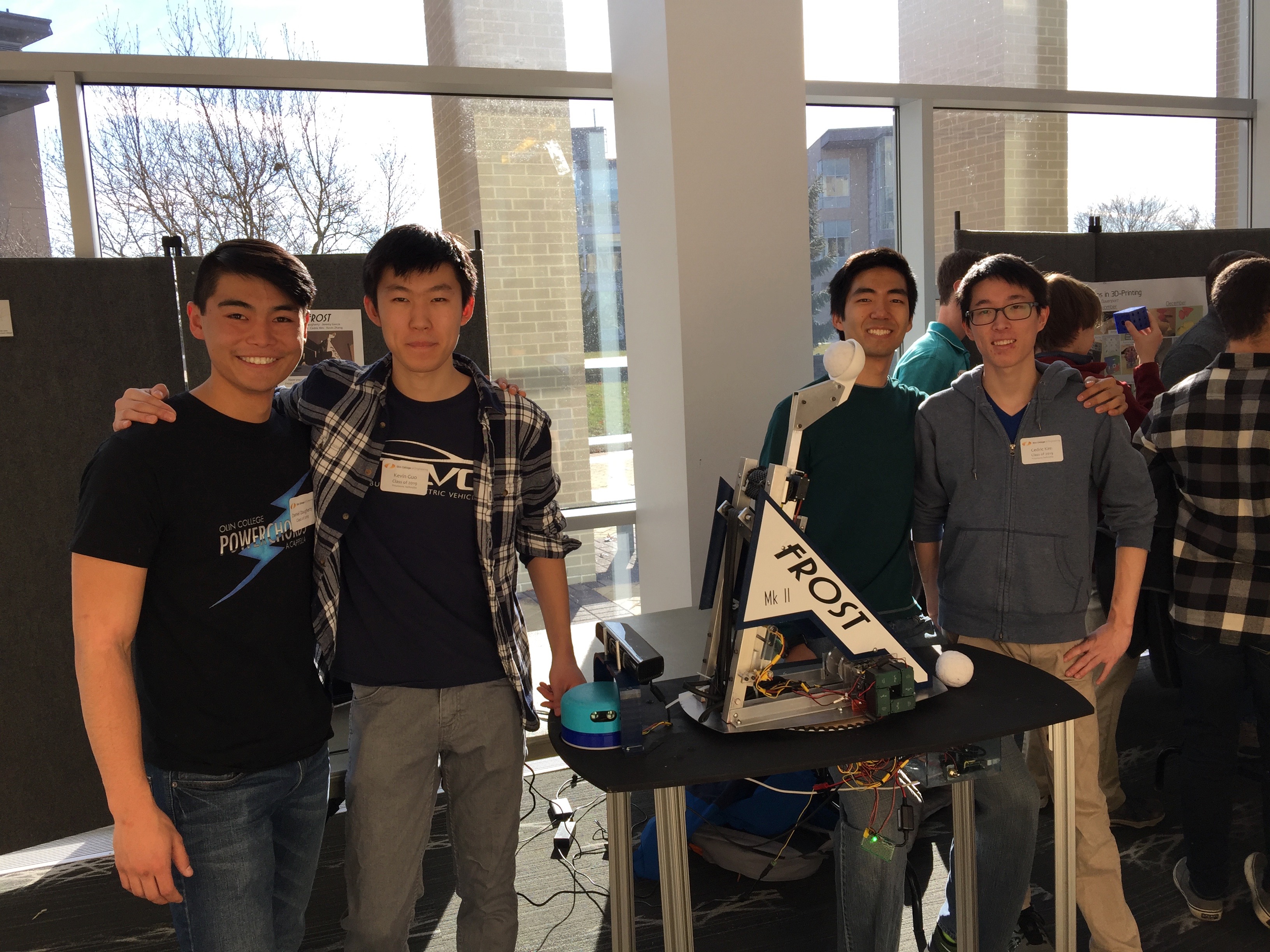
In October of 2016, I teamed up with friends Cedric Kim, Daniel Daugherty, Kevin Guo, and Jeremy Garcia under the name Stark Industries to design and build an autonomous snowball launcher. With winter coming up in Boston and weather forecasts predicting a bountiful snow season this year, we wanted to collaborate and put our skill sets together to create the ultimate weapon in snowball fights. We noticed from last year's snowball fights that we were really bad at hitting the opposing team, and getting wet in the cold from snow falling into our clothes wasn't fun. We wanted to build a robot that could dominate snowball fights, with bullseye accuracy and strong defense against snow. To make some tangible goals, we set forth a number of specifications that we wanted this robot to have: it would be able to shoot up to 40 feet away, be able to automatically arm and re-arm itself within 6 seconds, find and lock on targets without any user input and fire more accurately than a human, and be able to handle the entire snowball shooting sequence from packing a snowball to firing it by itself. We named this robot Frost.
To build Frost, we decided to split up into subteams to tackle the individual components. Jeremy and I would take on software, and Cedric, Daniel, and Kevin would take on mechanical. Due to a lack of a strong electrical engineer, we decided that we would all pitch in for any electrical portions, of which there were few. We split up the project into four two-week sprints, with goals to meet each sprint. Cedric and I took informal leadership roles in our subteams as well as planning out next steps and sprint goals. Due to schedule conflicts, we decided that each member would be responsible on their own for finishing their portion of that sprint's goal, and as close friends, we trusted each other to do so. With this setup, we managed to complete the project in under 8 weeks.
In the First Sprint, we decided to first create a proof of concept that such a robot was physically possible, as there were no online sources to confirm its feasibility. Our goal was to create a prototype, a miniature catapult that could be electronically controlled. On the software team, our main goal for this sprint was to write the firmware for the Arduino that controlled the motors to actuate the catapult and turn the pan control. I worked mainly on getting the firmware logic to work with panning towards a specific direction, arming, firing a set distance, and then re-arming. Jeremy created a basic interface so that we could easily manipulate various variables to test out our catapult prototype. By the end of the sprint, we were able put together a prototype of Frost. I managed to streamline the firing sequence such that we met our goal of arming, firing, and re-arming in under 6 seconds. We tested the catapult in multiple different experiments and confirmed that it was indeed possible to create Frost. It was feasible to create an autonomous snowball launcher. We were on a roll.
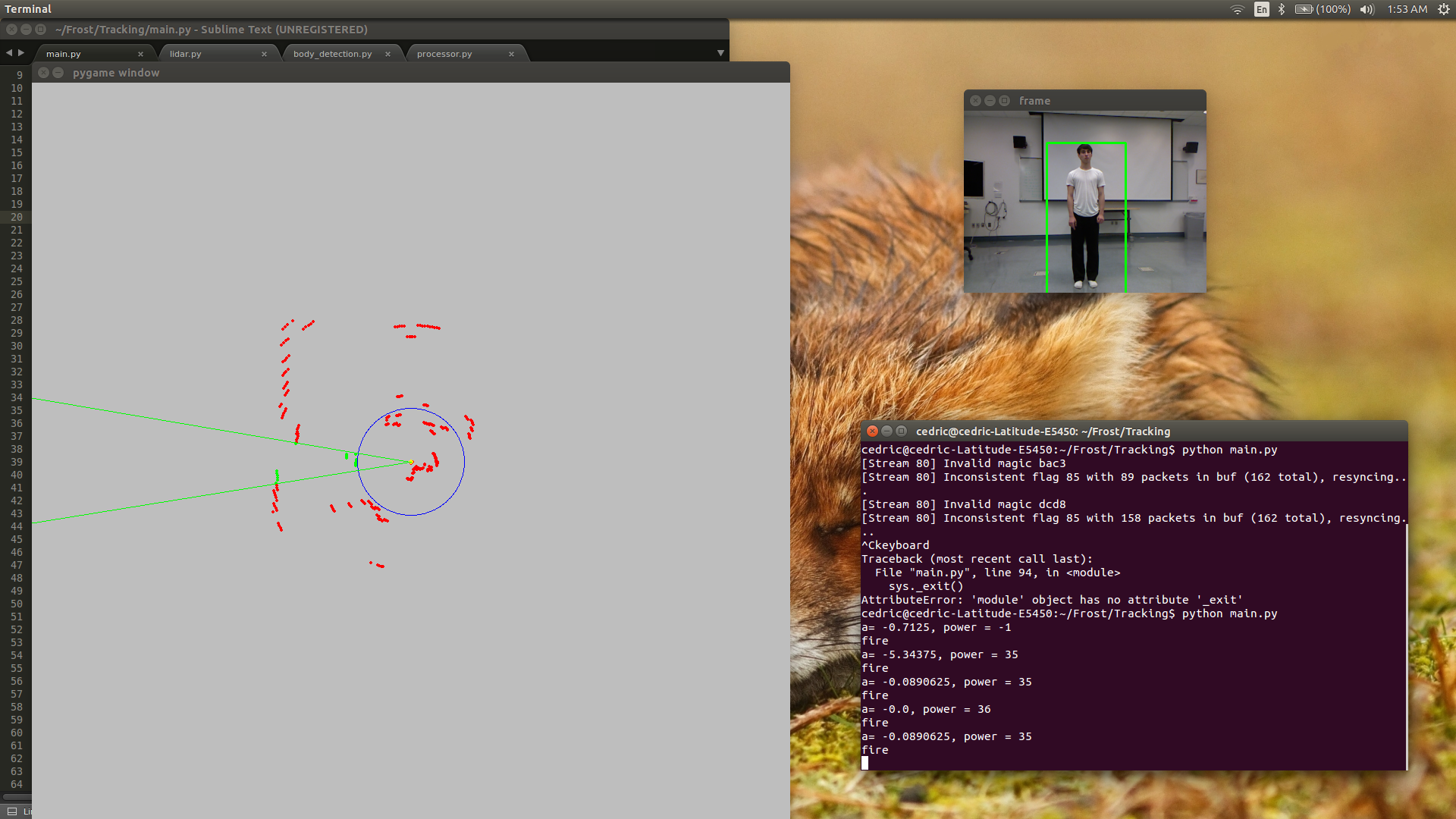
For the Second Sprint, our goals became a little too ambitious. We wanted to push our limits and see how far we could get, so we decided to create all the intelligent and autonomous parts of Frost. Mechanical decided to try and build their own LIDAR and create a compactor mechanism for packing snowballs, and software decided to attempt autonomous vision tracking and interface with the LIDAR once built. For this sprint, I worked mainly on interfacing with a Kinect camera and getting computer vision to work with our prototype as well as helping out with interfacing with the LIDAR, and Jeremy worked mainly on experimenting with various methods to try to find and track a human in a camera's field of view. Jeremy found out that motion detection was a viable option, but we soon discovered that the pan motor was too often confused because the outputs weren't consistent enough. The mechanical team also did not have much luck either. At the end of the sprint, neither subteam was able to reach their goals. We decided to pivot away from a completely autonomous robot and tossed the idea of the compactor. Now the robot was autonomous starting from when a user gives it a packed snowball. We treated this sprint as a significant learning experience about proper scoping and understanding our limits.
In the Third Sprint, we kept our same goal as before to finish adding autonomy to Frost, but this time with renewed vigor. I joined Jeremy in experimenting and developing finding and tracking. I discovered a robust method through body detection that used machine learning to search for the contours of a human body, and together Jeremy and I worked on developing this method. We managed to bring accuracy of detecting a human body up to over 90%, and I optimized the algorithm to ensure constant, consistent output so that the actuators would always know where to go. I worked with Cedric on the LIDAR, mainly in creating a multiprocessing code architecture to integrate it with the data from the body detection module. I also wrote out the decision making algorithm that told Frost where to point and how far to shoot based on inputs from the Kinect and the LIDAR. By the end of the third sprint, we had successfully created an intelligent version of Frost, capable of finding targets on its own and firing towards them with a successful hit percentage of about 80%.
In the Fourth and Final Sprint, it was the home stretch, and our goal was to finish building the final robot and integrate all our intelligence on the final version. For the software team, this meant optimizing the LIDAR, body detection, and integration modules and making sure they were perfect. I took on the task of optimizing the software modules, and Jeremy decided to create a nice website to document our work. I managed to stabilize LIDAR output and optimize the body detection module to correctly detect and track bodies almost 100% of the time, with constant output. Finally, I improved the integration and decision making algorithms such that Frost's firing accuracy was about 98%, always shooting within 6 inches of the target's center, which is almost a guaranteed hit. After that, I worked with the team to build the catapult. We finished fabricating and assembling our final catapult, which was bigger, made of metal, and much stronger than the prototype. We also remade our circuit boards and other electrical components to accommodate for the new robot. With the finished Mechanical, Software, and Electrical components ready, we finished our project by integrating all the parts together and improving the final product until it was ready. We completed Frost in December 2016.
Come Olin EXPO, we showcased Frost to the community and let guests have a test run with getting found and shot at by Frost up to 40 feet away. Unfortunately, there was no snow that day, so we settled with a plushy toy. Even then, the crowd was blown away by our work, and many people wanted multiple turns. After some documentation and publicity work, we have completed our work with Frost - the Autonomous Snowball Launcher. Come next semester, when the snow begins to fall, the people who once gaped in amazement will soon run in fear when we return from winter break to dominate the snowball game.
Interactive Robotics Laboratory
Research Project Lead - Olin Robotics Lab
Fall 2015 - Present
Fall 2015
In the Fall of 2015, my first semester at Olin College, I joined the school's Robotics Lab, eager to learn more about robots and how they worked. I decided to work with the lab's head programmer, Sophia Li, on Edwin, a robotic arm. Our objective was to program Edwin to respond to certain stimuli and interact with users with poses and gestures. Coding was done in Python, and ROS was used as the bridge between Python and Edwin. I mainly focused on creating motion algorithms that Edwin would use to respond to certain signals from the user. At the Olin Expo, we presented our semester's work, which culminated in Edwin playing Tic-Tac-Toe against himself. Our presentation went really well, and many were fascinated in our robot's ability to draw the grid and shapes so accurately.
Spring 2016
In the Spring of 2016, we took things a step further, working to synthesize a comprehensive and realistic interaction sequence, where people can talk to and play with Edwin as if he were a real live “dinosaur”. This time I took on a larger role, working closely with Sophia to plan out and create interactions and behaviors. I was involved in a lot more projects this time. First I decided that a moving jaw was better than a slack jaw, so I scrounged up a servo and managed to write a modular program in C++ for an Arbotix board that would allow us to control Edwin's lower jaw. I also spent quite a bit of time figuring out touch sensitivity. One thing we thought would be really cool was if Edwin could react to touch. I worked on programming an accelerometer in C++ not only how to recognize when it's being touched but also to differentiate between a pat and a slap. After all this hardware work, I partnered up with Sophie to connect all the pieces together by creating a "brain" module where all information was fed to and where all actions were executed in response to stimuli. Finally after we had finalized the interaction sequences, my last job of the semester was to generate all the motion behavior algorithms that would be used in the interactions. Overall, I wrote almost 50 different behaviors for Edwin. Once again, we presented our work at EXPO, and Edwin dominated by beating people left and right at Tic-Tac-Toe. But challengers continued to arrive, and our table was crowded as people were amazed by Edwin's almost "human-like" behaviors.
Fall 2016
In the Fall of 2016, I decided to borrow some concepts from my internship at Ivani during the past summer. My goal was to accomplish presence detection, or give Edwin the ability to detect the physical body of users inside a room and follow them around or create playful interactions, such as responding to hand waves. I worked a lot in C++ and Python this semester, and I delved heavily into APIs, computer vision, algorithms, and machine learning. To start, I did a lot of research into Cmakelists and experimenting with the sample code to get the Kinect Nite API working on Edwin's system by figuring out how to interface C++ with ROS. I then wrote Python scripts to communicate to my C++ scripts via rostopics and wrote various data structures and algorithms to keep track of and remember detected bodies. Combined with motions from Edwin's behavior repertoire, I was able to make Edwin physically respond when a person enters his field of vision, creating presence detection. I further developed the code to keep track of coordinates, and using tf transforms in ROS with rotating reference frames, I was able to make Edwin move to specified coordinates in response to the location of the person of interest. This then gave Edwin the ability to follow users around a room. I was also able to have Edwin detect and keep track of a person's hand. I developed this module so Edwin can detect when a person waves his hand by searching for a repetitive sweeping motion. Finally, I integrated these two pieces into one interaction sequence, where an approaching user will prompt Edwin to greet them and begin following them, and when that user waves, Edwin will respond happily. The interaction sequence can then be toggled on and off to lead into other interactions sequences or follow people while idle. Overall, I made Edwin feel a lot more autonomous and intelligent by giving him the ability to find people on his own and follow them. When we presented Edwin at EXPO, people were wow'ed by Edwin's ability to recognize hand waves, and many were very impressed by Edwin's interactivity, as my presence detection module made him feel personal and alive.
Spring 2017
In the Spring of 2017, I became the full-time Project Lead of Team Edwin. It was a substantial shift, but I was up to the challenge. This time I worked on a project with my former Project Lead, Sophie Li, as well as two freshmen, Yichen and Katya. We were creating Project: Simon Says, where Edwin could play Simon Says with other users, and could play both as Simon and as a Player. We wanted the game to be as close to a game between two humans as possible, so the only fully digitalized portions were the cognitive ones such as deciding if a player had followed intructions properly or figuring out whether or not to move based what Simon said. I would work mainly on having Edwin learn new movements for when he was a player so he could decide whether or not to move and then how to move based on instructions from the user Simon. I also headed the project and thus was in charge of integrating the other members' work on other parts of the game, such as talking and listening, recognizing a user Player's movements, and so on. I utilized Python and C++ once again and immersed myself in computer vision, speech recognition, and machine learning. I created a massive pool of basic movements, and then created a speech recognition library to catch for keywords that would hint at a particular command. Once the command was decided based on what the user stated, Edwin would construct a complex movement sequence from his pool of basic movements to move based on what the user Simon told him to do. There was also the added functionality of deciding whether or not to move in the first place based on whether "Simon Says" was stated. After finishing the Edwin Player module, I worked to coordinate with the other members for the Edwin Simon and speech modules. I then integrated all of our work into a comprehensive game sequence that played Simon Says from start to finish. After finishing Simon Says, I went further and helped finalize other Team Edwin's projects as well, giving aid to freshmen and pushing their project along in anticipation of the end of the year. I also helped them integrate their projects together, so that in the end there was one massive game sequence tree, where a user approached Edwin, selected from a screen of options, and then played the chosen game with Edwin. When we presented at EXPO, I was charge of the Edwin station for the first time this semester. Overall the crowd was huge as always, and everyone was impressed with the various games they could play. People were most impressed by the fluidity in which Edwin could cycle through and shift between game modes and greeting people, a result of my integration work and coordination/help from everyone on the team. Given it was my first time heading the team, things went pretty well. Going into next year, Sophie, my mentor, will have graduated, so it'll be up to me to lead the team into our next projects. I plan on improving upon what happened this year and making next year the best yet!
Fall 2017
The Fall of 2017 was my first semester solo-leading the Edwin team, now known as IRL (Interactive Robotics Laboratory). A successful semester beginning and strong presence at club fair gave us a unprecedented 20+ team this semester, which was quite a crowd to handle, but things aren't fun if they're aren't difficult. We divided ourselves into 5 different mini-projects based on our individual learning goals. I teamed up with fellow Oliner Hannah Kolano to create a Connect 4 AI that could allow for Draco, our second UR5 robotic arm from Amazon Robotics, to play Connect 4 with other players on a physical Connect 4 board. The plan was that I would handle controls by creating a brand new control suite for Draco, and also the game itself with Reinforcement Learning. Hannah would take care of the Computer Vision portion and building a custom-made Connect 4 board that allowed for easier access for Draco's big head. Mid-semester technical problems with the arms' hardware led to setbacks that hindered my ability to fully explore this field. But Reinforcement Learning was something I was very passionate about, so I put in the time to make it work. After much research and prototyping, I managed to arrive at a conclusive answer. I had created a successful Q-Learning engine that could play Connect 4 at a pretty optimal level, but training it to its full ability required computational power that was outside the scope of the RoboLab, even outside that of our college's supercomputer. Its training on my personal laptop could reach an acceptable level of intelligence, but we decided as a team that it wasn't presentable to the public (its intelligence was not easily perceivable by the average lay man). A neural network would've solved all of our problems, but there wasn't enough time to implement one and test it. Thus I quickly pivoted and created a Minimax algorithm instead, as I knew about its potential in solving game decision trees. After learning about them, I implemented one to much success, a Minimax engine that could play Connect 4 at the optimal level. The control suite had already been planned out at that time, so it was just a matter of execution. I completed my portions of the project with time to spare, and went on to assist Hannah with hers, as she was a bit newer to all the Computer Vision concepts. Throughout the semester, I was also heavily involved in all the other projects as well. I gave ample advice and debugging help to all 4 other projects while handling my own, and I moved my teammates' progress ahead as much as I could. By the time EXPO came around, we had all 5 projects finished and able to present. And our presentation was an incredible success. We had so many presentations that we had to break it up into two time slots, and our table drew amazed crowds for a full two hours. This semester had some bumps in the road, but it was also an incredibly productive 4 months given what we had to work with. I've learned a lot from this experience, and plan on entering Spring ready with a tangible game plan for an even better semester.
#GetReal
Software Design Final Project
Spring 2016
In the Spring of 2016, for our final project in Software Design, we were given 6 weeks to make something "cool". Once again, I partnered up with my friend Daniel Daugherty, but we also teamed up with our other friends Cedric Kim and Kevin Guo. After a long discussion, we managed to fuse together all our interests into a single idea: we were going to create an augmented reality goggle set that would allow users to see their CAD models in real life before even having to fabricate. The idea is that software designers can easily test things by writing up some code and pushing a button, but for mechnanical and electrical engineers testing is a rigorous process of trial and error, constantly building and re-building. Our goggles would level the playing field by providing the ability to test out CAD models in 3D space and rapidly prototype efficiently.
The teachers were very concerned with our project when we presented the idea to them, as they didn't think it was possible within 6 weeks. But we said "YOLO" and went with it anyways. We split the project into two main portions, to be split among the two pairs: Daniel and I would work on the 3D graphics portions with OpenGL and figure out how to render a CAD model given an .stl file in the real world at some arbitrary point, and Cedric and Kevin Guo would work on tracking and orientation such that our 3D render would be grounded to a specific point and would look like it was really there on the table. To make it within the 6 week timeframe, we made several clever design decisions to circumvent of the most time-consuming portions. To make the program work like virtual reality, we created two fullscreen windows of our program and calculated their distance apart to create stereoscopic vision, and then used a pre-made mobile app that would project our PC screen onto a phone, which could then be used in a Google Cardboard. We also strapped a webcam to the Google Cardboard such that the person could move around on their own and make it seem more real. To simplify the tracking, we utilized a blue checkered piece of cardboard that was easily recognizable. The piece would be tracked by color and then really complicated "Quadrant Math" would be used to find the positions of the four corners, which would tell position, orientation, and depth. On the 3D graphics side, Daniel and I did this completely using paired-programming. We encountered a huge challenge in rendering a cube; in fact it took us half the time just make a cube appear in our webcam frame. After that, though, we understood the library and continued to blast through the rest of the graphics. I managed to figure out how to render CAD models, and Daniel figured out shading, such that the model looked real. We decided to add additional features to make the model interactive, such as zooming in and out of models, changing colors, rotating the model for different views, etc. I also worked on optimizing the rendering software such that the raw-to-processed lag time was only approximiately 100 milliseconds, perfectly acceptable for human usage. After that, we pulled an all-nighter to integrate the two halves together. We completed the project at 8:05 AM the day it was due.
When we presented at Olin EXPO, there were a lot of "Wow's" and "Ooo's" and "Ahh's". Many people were impressed by our project, and we were even approached by an MIT representative and invited to present our work at an Inventor's conference at MIT. People said we couldn't do it, and sure it was super hard and a very, very long journey, but in the end we had succeeded. Special shoutouts go to Cedric Kim for keeping our spirits high when we hit roadblocks, and Daniel Daugherty for sticking it out with me when we got stuck and for keeping me awake throughout the all-nighter.



Olin Aquaponics
OWL Extension Project Team
Fall 2015 - Present
Fall 2015



In the Fall of 2015, my first semester at Olin College, I joined a team of individuals that embarked on an extension of the original "Olin Workshop on the Library", a remodeling of the library to include a giant aquaponics aquarium. Aquaponics is like sustainable hydroponics, where marine and plants live in a symbiotic relationship of sustainable growth. The plan is to eventually incorporate this idea into the library. Our first step was to build a small operating aquaponics system to prove feasibility. I was mainly involved in the electrial portion of the project, designing and creating the relay system, monitor system, pumps, and lights. We presented the result of a semester's worth of work at the Olin Expo, where we demonstrated a functional system. Students and faculty alike were excited at our progress and looking forward to our efforts next semester.
Spring 2016


In the Spring of 2016, there was a transition of leadership, as the original seniors who started the club appointed a friend Nick and me as the new leaders of the club. After figuring things out, we officially began in the middle of the semester. Our work this semester consisted mainly of turning our "functional" system from last semester into a polished, professional aquaponics system. This mainly involved designing and building a cabinet around the metal frame, improving the water works and pipelines, and ensuring ecological success with the plants and the nurtients. I was working all three portions of the project, as well as coordinating with the team for meeting times, and talking to faculty and the library for support and sponsorship. In the end we managed to create a complete Aquaponics Cabinet with healthy, fast-growing basil. Our yield was approximately 1 quart of basil per month. We presented our system at EXPO again, and this time was met with even more of a crowd and praise. We were even approached by neighboring schools and Olin faculty about the possiblities of working together or sponsorships, such as the Charles River Center's Horticulture Program. As the new co-president of the team starting next semeser, I'm eager to see what we can do in the Fall.
Fall 2016

In the Fall of 2016, as the new club co-leader, I managed to negotiate a new system with our new sponsor, the librarian, that would be built into a bookshelf, so that we would have a fully integrated system that would exist literally inside the library. Our goal for this semester was to design and start building a functional version of our new system. The new system would be twice as big as the old system, and it would have a fully functional aquarium outfitted with aqua life, making it a complete aquaponics system. Once functional, it would have a yield of about 1 peck per month, and it would use even less energy and require less maintenance than the old system. As co-leader, I dealt with the high level organizational work, such as talking with sponsors and buying supplies from vendors, handling budget and logistics, and streamlining workflow among the subteams. We also attracted new members and raised team membership from less than 10 to over 20. On the techincal side, I worked with all subteams, including plumbing, ecological, electrical, and mechanical, making sure that teams were progressing smoothly, ensuring inter-team communication, and solving technical problems that arose in the teams. I designed the sensors for the system, such as water level and plant growth sensor systems. I was also in charge of maintaining the old system, as we were still growing basil in it. Due to technical diffculties, we were unable to finish the functional system, although we do have all the components flushed out and built. We presented our work at EXPO again, and this time was met with renewed interest at the possiblity and progress of a "sustainable garden" in the library. We made a lot of progress this semester, and I'm sure that by the end of next semester, we'll have completed the second system.
Spring 2017




In the Spring of 2017, I doubled down on efforts to build the library shelf system. We hit the ground running and immediately began plans for construction. I worked extensively on maintaining the old system while also helping with the electrical team to create the sensors and control box. My team of organizers and I also put in the extra effort to coordinate between teams and ensure that the direction one team was going would complement the direction of another team. I made sure to talk to each subteam lead every meeting to keep up to date on their activities and inciting discussions between teams should unknown conflicts be discovered. Due to our efforts to improve coordination, we actually caught a number of pitfalls where teams were planning on constructing conflicting designs, thus preventing a potential disaster come build time. As the principal lead, I also dealt with the high level organizational work, such as buying supplies from vendors, handling budget and logistics, and maintaining a steady schedule for the subteams. Our design changed a number of times as we encouraged and performed numerous unit tests to ensure functionality. Iterative prototyping was used extensively throughout all teams, at the advice of the organizers. By the end of the semester and a few late nights on behalf of the organizers, we had successfully built out the library shelf. We even tested its functionality and managed to grow some starter basil in it. Our system could fit up to 75 individual basil plants, and the system's efficient nutrient distribution expedited growth times for potentially monthly harvests. The school librarian was very impressed with our finished system, and at EXPO, while we couldn't bring the system with us since it was set into the library wall, we heard ample compliments from visitors and some buzzing talk among the crowd about a plant farm and an aquarium in the Olin library. But of course, this is just the bare bones of a functional system. Come next semester, we plan on iterating further on this system and improving its aesthetic and mechanisms. Once the library shelf system is fully polished and operational, we will be able to advance our mission of creating a sustainable garden in the Olin library.
Fall 2017



In the Fall of 2017, we aimed to polish and improve upon the library shelf system we had made previously. By the end of Spring, we had come upon a number of issues and wanted to make sure that we properly installed a robust ecosystem into the library. Once again acting as project lead along with 3 other Oliners, we set out to discuss how to go about improving the system, and our conclusion to scrap the old one completely and redo it from the ground up, this time even better than the last. So we restarted the entire journey from scratch. We began with research on the various pieces and broke subsystems down into conditions and requirements. This planning phase was where most of our improvements and deliberations occurred. We decided to buy various chemicals and sprays that would protect the metal and surrounding wood from water, while also taking "food grade" products into consideration for the fish and plants. We found a more mold resistant plumbing material, and also bought bulkheads to ensure sound connections to prevent leakage. We included some more aesthetic and outward appearance into account, so we included nice wooden facing and vinyl designing into our time and budget. There was a massive overhaul on the aquarium and many steps taken to ensure its stability and continued sustainability. The lights were completely remade, and this time we sought help from a professional to get advice on how to properly hook up a DIY grow light apparatus. Finally, we got some more fish to make for a more lively ecosystem in the aquarium. I made sure to be heavily involved in all parts of the planning/speccing process to ensure that the systems and various pieces would all integrate together properly. I also worked with a startup called KijaniGrows to establish an outreach relationship. They gave us much advice on various parts of the assembly, and showed us their educational kits for aquaponics, which were downsized versions of ours. After the planning and ordering came the assembly and building. This was almost textbook by now, as we've done it so many times in the past. The team knew what to do, and so I just let them at it, and personally was involved in the aquarium and the lights assembly. This time around was much more on schedule, and we finished the completed system with time to spare for the Olin EXPO. Everyone was very impressed with our professionalism and system design at EXPO, and our librarian was very pleased with the semester's end results. The main work done, next semester we plan on beginning planting, and seeing how well we can maintain the ecosystem in practice. With any luck, we might even get cleared for another project!
PianoPianoRevolution
HackHolyoke Hackathon
Fall 2016

In November of 2016, I attended HackHolyoke 2016. Teamed up with fellow Oliners Eric Miller, Kimberly Winter, and Max Wei, we came up with an idea that incorporated all of our interests: we wanted to create a MIDI keyboard that relied only on a depth sensor and a flat glass surface with key etchings. As we were all musically oriented, we wanted to create a proof of concept for a really modular, cheap alternative to a complex, expensive instrument such as a grand piano. Even MIDI keyboards were hundreds of dollars and generally bulky, so we wanted to see if it possible to create one that cost less than 50 and was way more portable. We named our project PianoPianoRevolution because there was talk of potentially creating a game to go along with the MIDI keyboard, kind of like DanceDanceRevolution where users could practice their piano moves with our portable keyboard, but this side of the project was never fully realized. As the most experienced software developer on the team, I was tasked with Kimberly Winter to interface with an off-the-shelf depth sensor called a Leap Motion and create a keyboard that could be played. Max and Eric would work on creating the encasing that users would use to actually play the piano. I managed to interface with the Leap Motion, and then Kimberly discovered that a key can be considered "played" by just striking down with a finger. She found that since the Leap Motion keeps a 3D map of your hands, theoretically you could just play like you were playing a real piano, and as long as your striked key finger is lower than all your other fingers, then you could play a sound for that specific finger depending on where in space it came down. I then worked on making her vision a reality. We used primarily Python, as well as sensor fusion, Leap Motion and Mingus APIs, and complex algorithms. Kim mapped out the keys in space, and I used her measurements to create a 2D projection of a virtual keyboard. I then wrote out a decision making algorithm to decide when a key was pressed based on the depth of the finger from the Leap Motion, and also what key was pressed based on where the pressed finger was in the 2D projection. Then I worked with Kimberly to incorporate piano sounds into the algorithm. Eric and Max eventually CADed a keyboard, which they laser cut onto a flat glass surface so that it appeared that the keys were etched into the glass. We continued to improve the codebase, making it more and more real, such as adding in the ability to hold keys, pressing more than one key at once, etc., until the hackathon was over.
When it was time to present our work to the judges, we had a completed MIDI keyboard ready. The keyboard was fully playable up to two octaves around the middle C key, and users could play scales, chords, and even whole piano pieces. We believe we did create a proof of concept showing that it is indeed possible to use high-end technology to make such affordable and modular instruments, and its feasibility and real-world impact become ever stronger with the introduction of precise depth sensors in new smart phones. The judges were amazed by our product and our vision, and they kept coming back to try it out and play small tunes on our keyboard. We ended up winning First Place Best Hack Award for our product. Funnily enough, a new startup on Kickstarter came out with a product called Freedrum, which was basically our product but for drummers, at roughly the same time. It was really cool to both be able to make such an amazing and innovative product, but also see that our vision was shared and being realized by others around the world. Maybe one day in the future I can fully realize this vision as well.


Cap'n Chicken
Software Design Final Mini Project
Spring 2016



In the Spring of 2016, in our Software Design class, our final mini project was to create an interactive program of our choosing. My partner, Daniel Daugherty, and I decided to make a game. Daniel wanted to do a shooting game, and I wanted to try out making something like a side-scrolling game. And god bless his soul when Daniel accepted my idea of making the main character a chicken. Thus the game Cap'n Chicken was born. The premise of the game is that a chicken is falling through the sky in an attempt to escape his farm, and he must either dodge or shoot eggs at attacking hawks to last as long as he can. We progressed through the project mainly with paired programming, but we did assign tasks individually. I worked mainly on the mechanics of the game, such as shooting, vertical scrolling, the enemy hawk computer algorithms, the chicken controls, scoring, and game play balancing. Daniel did a lot of the graphics and animations, such as the hawks, the chicken, the home screen background, the eggs, and the clouds and mountains to give a realistic feel of falling through the air. Together we tested each other's code and caught a of lot of bugs for each other. We also had a lot of fun trying to beat each other's high score. When we presented our game at the class exhibition, it was a huge hit. We had several people get really competitive and had to open a second computer with the program on it so that people could play at the same time and see who lasted longer. In the end, I was the one with the highest score, after a close battle with a friend named Jeremy. A lot of people loved our game, and several even suggested turning it into an app of some sort, because they would definitely play it. We plan on doing that in the future.
SmartLite
Codestellation Hackathon
Fall 2015


In November 2015, I attended my second hackathon at Codestellation in Brandeis. Inspired by a friend who once texted on her phone and walked straight into a wall on her way to class, my team decided to build a smart LED that could change color depending on the content of received messages. The theory was that this smart LED would allow cell phone owners to know what messages might be about beforehand and reduce time spenting looking at texts. For the purposes of the hackathon, we evaluated messages on Twitter based on a positivity standard. The project combined Python Twitter API, machine learning, Arduino, and cross platform integration. When a message was sent on Twitter containing a certain hashtag, a python script would catch it and run it through a machine learning program that generated a number based on posivitiy. This number would then be beamed to the Serial Port of an Arduino in C++, where it would be processed to make an LED shine a specific color. I was involved in all parts of the project, mainly spearheading the Arduino portion and cross platform integration bewteen Python and C++, and helping out on machine learning. Our project won the award for Most Technically Challenging Hack.
GoBikes ONLINE
Hack Holyoke Hackathon
Fall 2015


In November 2015, I attended my first hackathon at HackHolyoke. Having been at Olin for a while, I was dissatisfied with the college's bike rental system, where the sole means of "rental" was a clipboard hanging from the ceiling. With a team that was formed onsite, we developed a web app that put Olin's bike rental system on the internet. The web app could manage and monitor all the bikes allowed for rental, giving user-friendly access to checkouts, checkins, reservations, and problem reports. The app was made using HTML5, Javascript, and CSS. I wrote all of the front-end that required HTML5 and Javascript, and the my teammates styled everything with CSS. Our team won 4th place best Hack overall, and 2nd place for Most Societally Beneficial Hack. As my first year came to an end, I worked with the Olin faculty and managed to make our prototype website a reality. Now Olin has an online website that manages codes and keeps track of bikes all from the internet. It was really cool seeing my work pave the way for a new change at my college.
Ultrasound 2D Image Processor
Introduction to Sensors, Instrumentation, and Measurements
Fall 2015

In the Fall of 2015, for my final project in Introduction to Sensors, Instruments, and Measurements, we were told to utlize what we had learned throughout the semester and make something "cool". My partner and I decided to create an ultrasound range finder that would spin in a circle and then process the distance points it found to produce a bird's eye view of its surroundings. The range finder was built with a breadboard and circuitry, then attached to a motor on a mount. It was connected to an arduino that would receive the data and send it to a third-party processing program that would then plot the points on an axis in real time. I worked mainly on programming the Arduino and third-party processor and integrating the Arduino into the range finder/motor apparatus that my partner built. Come demonstration day, we showed our project to the class, and were met with astounding praise.
2048
High School Finale
Spring 2015

In the Spring of 2015, my final semester at William P. Clements High School, I collaborated with two friends to take on the challenge of recreating the popular mobile app game "2048" in Java. Having taken 4 years of formal Java training class at Clements, I felt it was time to test my skills. The game was expanded to not only recreate the original mode, but also include a beginner's mode and a two player mode where competitiors could race to reach 512 first. I was mainly involved with coding the homepage screen, the two-player mode, and the original mode. We utilized many things we learned previously but also learned many new concepts such as Mouse and Keyboard Listener, JPanels, basic animations and complex matrices. On the last week of school, we presented our project to the computer science class, and the students loved it. Some were even requesting copies that they could take home.
Fly like an Eagle
Design Nature
Fall 2015
In the Fall of 2015, during the second half of my Design Nature class, we were told to build a bio-inspired game that would entertain 4th graders. The only premises were that we were limited to a set budget of $100, and the game should embody the animal that we chose. Our team chose the Bald Eagle, and we built our game to model the swooping and feeding behaviors of the eagle. We designed an Eagle Costume meant to provide a full-body experience, and our game was unique from others in that it was a two-stage game, the first for swooping down and grabbing fish, and the second for throwing fish into your partner's "Eagle Head" hat. For the final demonstration, real 4th graders visited Olin and came to play our games. Our play experience went extremely well, with a majority of children who played our game telling us that our game was their favorite.
Olin Electric Motorsports
Olin Vehicle Team
Fall 2015 - Spring 2016


In the Fall of 2015, my first semester at Olin College, I joined REVO due to my love of electrical vehicles. This was the first year that we were going to transition from "research" to "competition", so I was excited to get in on the action. The team was designing a Formula electrical racing car that would be ready for competition by the Summer of 2016. I mainly worked on the Electrical and Programming Team, designing and coding CAN, our digital data transmission bus that links together and distributes information across the car. Specifically, I worked on CAN regarding the dashboard, Watchdog, and throttle sensing. We presented our work so far at the Olin Expo, having finished the design portion, and ready for the fabrication portion next semester.
In the Spring of 2016, we began fabrication, and I continued to work on CAN nodes for the car. As deadlines began appearing on the horizon, the entire Programming team was put into Electrical. I worked on Charging and IMD, as well as PCB boards for the Atmega microcontrollers that CAN would be programmed into. I also helped with fabrication of the electrical portions, such as soldering boards and testing already fabricated pieces. In the end, I was unable to attend the competition myself due to schedule conflicts, but apparently we did pretty well for a first year competition team, placing 2nd in Design and 7th overall.
While I am proud of the work that I've done with the team, my feelings towards REVO have begun to change. I originally thought of REVO as a place to learn more about electrical vehicles, but now I feel it's more just about how to build a car for competition. Whether that's something I'm still interested in, I'm not entirely sure yet. Only time will tell.
Mu Alpha Theta Math Club
Webmaster
2011-2015


During my four years at William P. Clements High School from 2011-2015, I was part of the MAO Math Club at our school. I participated in every meeting and practiced for competitions, but I always felt that communication between members and officers was lacking, and our member attendace was dropping over the years. When I became Webmaster my senior year, I revamped the club website, improving user-interface and accessibility. Members became more aware of the various opportunities to volunteer and compete, as well as more informed about the club's activities. I also worked with the other officers and paved the way for the founding of what is now known as MNHS - MAO National Honor Society. MAO became a dual club, one for the original competition club, and the other which held members who liked math and wanted to meet and discuss cool math topics but didn't want to deal with competitive pressure. MAO has now become an intellectual hub at Clements, with over 100 members and rising.
International Club
Artistic Director
2013-2015
From 2013-2015, I was part of the International Club, a group that exempified the diversity of culture at our school and which culminated in the school's annual International Festival, where the school celebrated and honored the many different regions of the world. In 2014, I became Artistic Director and was responsible for the cultural decorations for the festival. I helped design giant murals that marked the greatest cultural mythologies of the world and then managed decoration sessions to create and paint these giant murals. I also introduced new ideas to the festival such as cultural games and art galleries to showcase artifacts from around the world. The decorations committee finished a month early ahead of schedule, and then went on the make more decorations beyond the original standard. The International Festival that year was record-breaking and was our largest attendance to date.
National Forensic League Debate Club
Debater and Coach
2011 - 2015


During my four years at William P. Clements High School from 2011-2015, I was part of the NFL Debate Team at our school. We practiced for competition, with the hopes that we would qualify for the annual State Tournament with a shot at being the best in the state. I debated competitively for 4 years, qualifying two times for the Debate TFA State Tournament, and once making it into the Texas Top 50. I was also once crowned Debate MVP of my team in 2011. During my time with the club, I volunteered to help create a website that would help with communication, information posting, and document distribution among members. This was the first website I ever made. In my final year, I passed down my skills to underclassmen by running workshops and teaching novices how to debate.
Copyright © thezhangster.com 2021
Made with HTML5, JavaScript, CSS